|
View Inside DeformableMirror: |
|

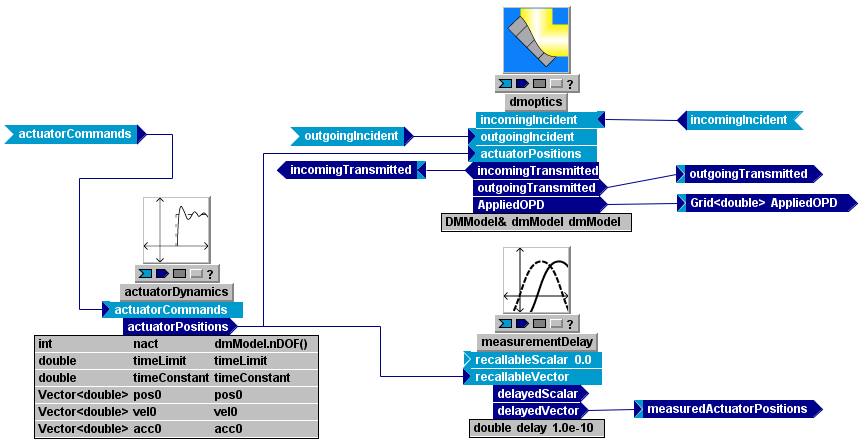
DeformableMirror models both the mechanical dynamics and the optical effects (applied OPD) of a deformable mirror. Actuator geometries, influence functions, and slaving relationships are generally specified using AoTool, and passed in via a parameter of type DMModel. The mirror actuators are modeled as critically damped harmonic oscillators. An idealized sensor (actually just a delay) measures the actuator positions and makes them available as an output. DeformableMirror is a composite system, consisting of three subsystems, of types DMOptics, ActuatorDynamics, and Delay.
C++ type |
name |
value |
description |
Parameters |
|||
DMModel |
dmModel |
Specification of deformable mirror |
|
double |
timeLimit |
0.0 |
Maximum amount of time that recallable outputs must be kept (if zero, then forever) (s) |
double |
timeConstant |
1.0e-6 |
controls the speed of bsm response; the bsm is modeled as a two-axis critically damped harmonic oscillator. |
Vector<double> |
pos0 |
Initial position |
|
Vector<double> |
vel0 |
Initial velocity |
|
Vector<double> |
acc0 |
Initial acceleration (command) |
|
Inputs |
|||
Describes all light incident from the "incoming" direction |
|||
Describes all light incident from the "outgoing" direction |
|||
Outputs |
|||
Describes all light transmitted in the "incoming" direction |
|||
Describes all light transmitted in the "outgoing" direction |
|||